-Language-
传统的机器人示教技术大致分为示教器示教和离线示教,需要操作者熟悉机器人的相关专业知识,且操作繁琐,门槛较高。随着以人机共融为目的的协作机器人的发展,引导示教技术已经成为协作机器人示教的主要方式。目前的引导示教主要有三种,一是基于机器人末端安装多维力/矩传感器的引导示教,成本较高,且只能拖动机器人末端;二是基于关节传感器(力矩传感器或双编码器)的引导示教,虽能拖动关节,但因关节传感器的存在,使关节结构复杂,成本提高;三是基于关节力矩补偿零力控制的无传感器引导示教,成本最低,但难度较大,尤其是精确动力学模型的获取和摩擦的补偿。
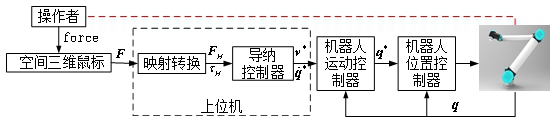
那么能否找到一种成本低、难度小,既能实现机器人关节拖动,又能实现机器人末端拖动的示教方式呢?答案是肯定的,那就是基于无线空间鼠标的机器人引导示教技术。该方案主要是通过无线空间鼠标采集操作者的引导意图,并将鼠标信息发送给机器人控制系统,采用基于速度输入和位置控制模式的控制策略(如图1所示),实现机器人拖动引导。
基于无线空间鼠标的机器人引导示教流程(如图2所示)。

通过该种方式,既能实现机器人关节坐标系下关节、多关节拖动,也能够实现基坐标系下单自由度、多自由度、位置保持、姿态保持拖动,如视频所示。
拖动的鼠标可以随意放置,既可以放置到机器人上,也可以放置到桌面上,甚至还可以双手持鼠标操作。该种方式既可以点位拖动,也可以轨迹拖动,适应性强,可以应用到多种场合。




